Robotic Academic Work
Industry Work
I used to work at Realtime Robotics, as a motion planning software engineer. I can’t share the code that I wrote publically, but I wrote a lot of the motion planning algorithms that we used, adding a lot of extra profiling and tracing features that we used to specifically optimize motion planning compared to which collision methods we were able to use, and adding mission critical features, like being able to autonomously and safely move the robots back to their starting positions after system failures. I also wrote a lot of what I call glue work; adding internationalization to our first app, adding linting tools like clang-tidy and clang-format to the code base, and writing low-level communications between our application and Siemens simulation program, Tecnomatix.
I was also one of the lead developers on their autonomous driving projects, doing a lot of simulations and analysis for our hardware development; that project doesn’t seem to have lasted after I left though.
Slides
I gave a presentation to the KavrakiLab in October 2020 about industrial robotics, and how it differs from academic work.
Master’s Thesis
Abstract
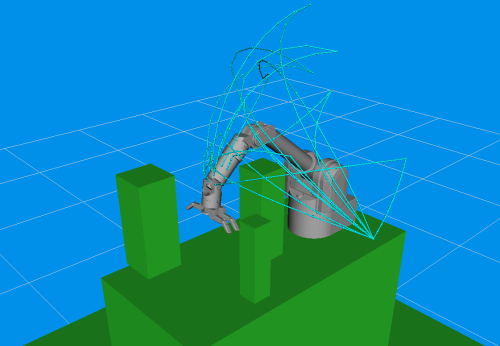
Robotic path planning is a critical problem in autonomous robotics. Two common approaches to robotic path planning are sampling-based motion planners and continuous optimization methods. Sampling-based motion planners explore the search space effectively, but either return low quality paths or take a long time to initially find a path. Continuous optimization methods quickly find high-quality paths, but often return paths in collision with obstacles. This thesis combines sampling- based and continuous optimization techniques in order to improve the performance of these planning approaches. This thesis shows that the advantages and disadvantages of these approaches are complementary and proposes combining them into a pipeline. The proposed pipeline results in better path quality than either approach alone, providing a robust, efficient, and high-quality general path planning solution. The use of collision checking techniques introduced by continuous optimization methods in sampling-based planners is also analyzed and approximation error rates and timing results are provided.
Full Thesis
Publications
- Willey B., Zucker M. (2021) Optimization-Based Planners. In: Ang M.H., Khatib O., Siciliano B. (eds) Encyclopedia of Robotics. Springer, Berlin, Heidelberg. doi/10.1007/978-3-642-41610-1_173-1
Slides
- An non technical introduction to my master’s research work
- A more technical presentation of my master’s research
- Reinforcement Learning for Robotics with Cannon Lewis